
Závěrečné práce - ROBOLAB

únor 2006
skupina A1
skupina A2
skupina A4
skupina A5
skupina A6

březen 2006
skupina B1
skupina B2
skupina B3
skupina B4
skupina B5
skupina B6

Skupina A6
Zpracovali
Pavel Pokorný
Martin Šoulák
Jan Krátký
NitroLAB typ PMJ-2122
Popis modelu
Tento model vznikl z naší fantasie. Hlavní konstruktér P.Pokorný vymyslel speciální zatáčení na stisknutí senzoru. Přední náprava reagovala na stisk jednoho ze dvou senzorů připevněných na udělaném ovladači a otočila kola do požadované strany.Tím jsem docílili zatáčení celého stroje. Mezi další přednosti patří diferenciál na zadní nápravě, který zajišťuje sílu otáčení motoru. Stroj jsme dále vybavili předními a zadními reflektory a zeleným podsvícením.Všechny přednosti jsou vyobrazeny na přiložených fotografiích.
Program
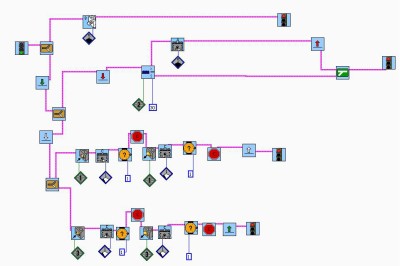
Program nám dal hodně práce, ale nakonec jsme program zakončili úspěšně. Spočívá v 8 větvích, ve kterých se vykonává určitá funkce.V první části program rozsvětluje všechna světla a roztáčí motor pohybový na celé auto. V druhé části je naprogramovaná pohyblivá přední náprava, jenž nám dala největší práci.
Fotografie modelu
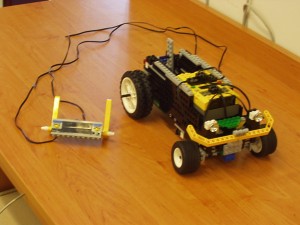
Celkový výsledek s ovládacím zařízením

Diferenciál, jímž jsem vybavili zadní nápravu

Celkový výsledek ve tmě. Jasně rozpoznatelné
zelené podsvícení, zadní a přední světla.