Závěrečné práce - ROBOLAB

únor 2006
skupina A1
skupina A2
skupina A4
skupina A5
skupina A6

březen 2006
skupina B1
skupina B2
skupina B3
skupina B4
skupina B5
skupina B6

Skupina B4
Zpracovali

Filip König a Marek Plieštik
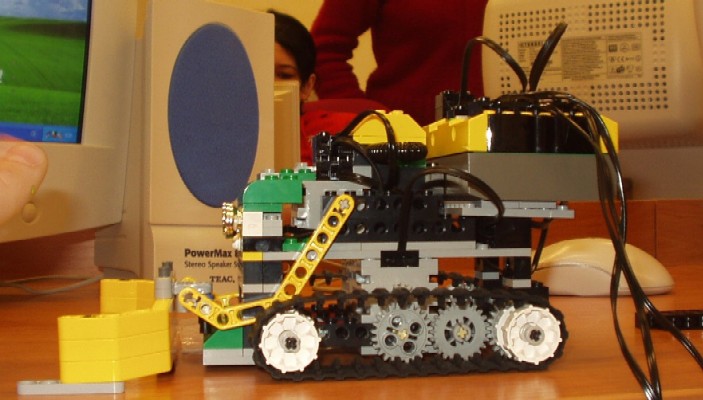
Rolba
Popis modelu
Vytvořili jsme rolbu, která se uměla pohybovat všemi směry pomocí dvou motorů. Každý motor se staral o jeden pás rolby. Třetí motor zvedal a spouštěl radlici, která byla podle svého vzoru pravé rolby na vyhrnování sněhu. Se třemi tlakovými senzory jsme tak plně využili kapacitu procesoru. Rolba tak v konečné fázi jezdila všemi směry a spouštěla a zvedala radlici na přední masce jsme také měli dvě světla. O konstrukci a technické zpracování se postaral Filip König o chod a o tvorbu programu Marek Plieštik.
Program
Program jsme měli velmi propracovaný a složitý , protože jsme na něj měli velké nároky. Ze začátku jsme skoro vůbec nevěřili, že to dovedeme do zdárného ho konce. Museli jsme se hodně zamyslet, promyslet. Nakonec jsme měli štěstí, že na první spuštění nám program skoro ze všech větví šel až na nějaké drobnosti, které se lehko vyladili.
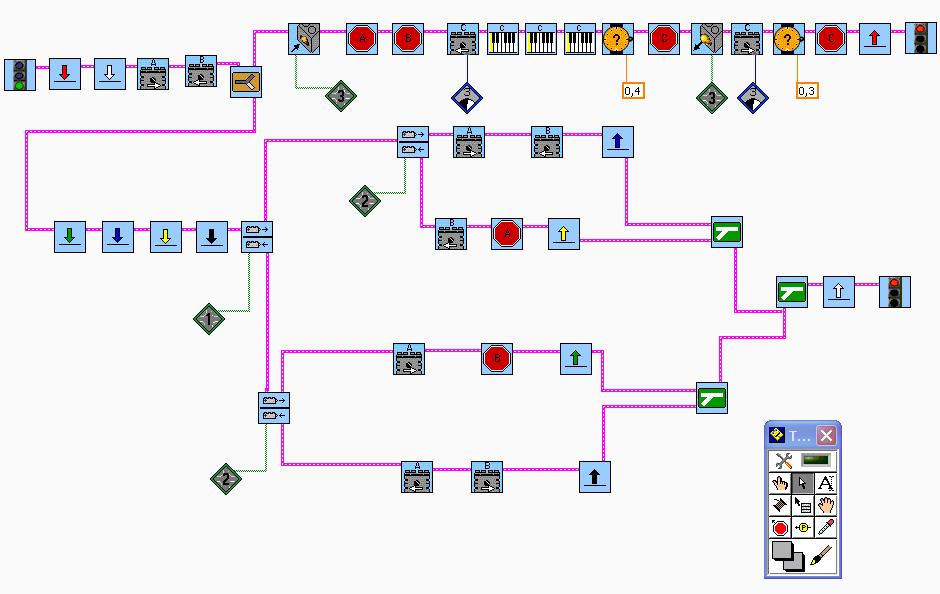 (pro zvětšení klikni na
miniaturu)
(pro zvětšení klikni na
miniaturu)