 |
Závěrečná práce - ROBOLAB9.B - 2006/07 |
 |
||||||
|
A - prosinec
skupina A1skupina A3skupina A4skupina A5skupina A6B - leden
skupina B1skupina B2skupina B3skupina B4skupina B5skupina B6
|
Skupina B6 - Tomáš Zástěra, Matouš Vorčák
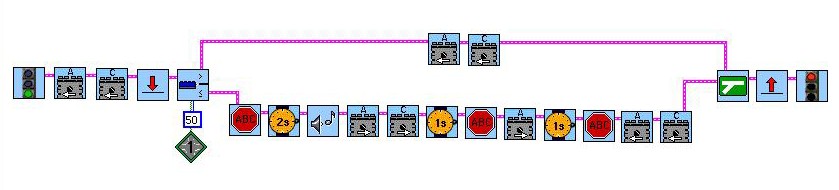
KoloťukPopis modeluTento model se po zapnutí tzv.kostky rozjede dopředu.Měří světlo pomocí světelného senzoru.Pokud najede tento model na tmavou plochu zastaví se, couvne, pootočí se a jede dál. Naměří-li senzor hodnotu o 50% menší model se zastaví, couvne, pootočí se a jede dál. ProgramProgram se skládá ze dvou motorů, které jedou stejným směrem.V tomto programu je použito větvení pomocí podmínky(světelný senzor).Je-li hodnota menší než 50% funguje spodní větev, která se skládá z motorů, jedoucí opačným směrem. |
|||||||


 |
 |
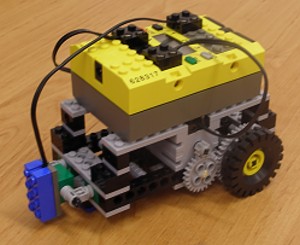 |
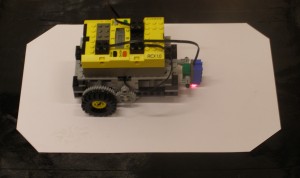
| jeden ze členů skupiny | testování modelu na ploše | konečný model |