 Skupina
4
Skupina
4
Skupina
4
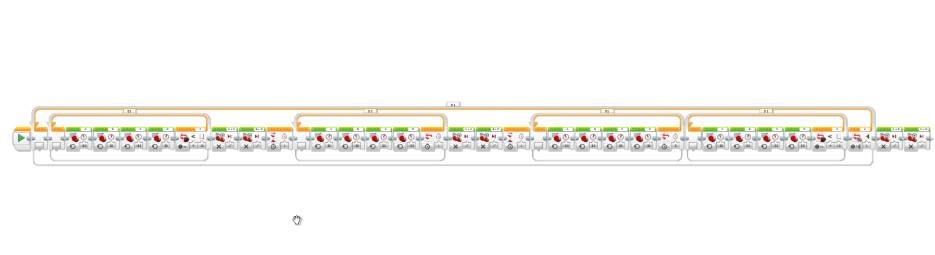
Robot jede dopředu do té doby, než neuvidí překážku vzdálenou 10cm. Potom se na 1 sekundu zastaví, pojede dozadu a po chvíli se na místě otočí o 90 stupňů a zase program jede od začátku. Když ale uvidí překážku a držíme tlačítko, motory se vypnou.
Po spuštění programu se všechny motory rozjedou a jedou dokud senzory nezaznamenají 10 cm před něma překážku. Po zpozorování překážky se motory zastaví a rozjedou opačným směrem na jednu sekundu. Poté se robot pootočí o 90 stupňů a tento program se opakuje pořád, do vypnutí.
|
|
|
|
| levý bok | předek | pravý bok |


