![]()
![]()
 Skupina
06
Skupina
06
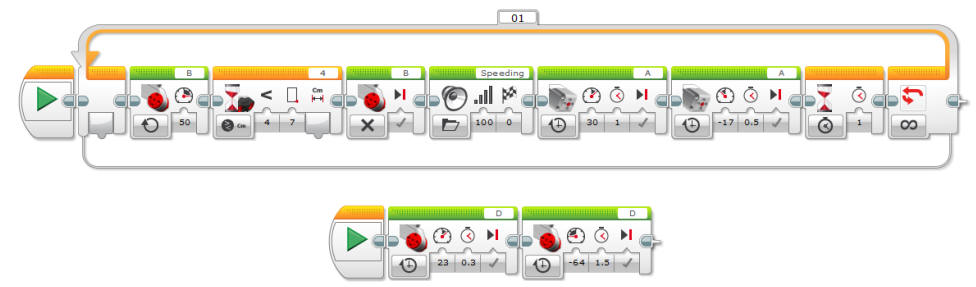
Náš robot jede po zapnutí programu dopředu. Až uvidí překážku tak se zastaví a svými klepety ji scvakne. Po spuštění druhého programu robot vystřelí.
Robot jede dokud neuvidí překážku před sebou daleko 7cm. Až ji uvidí zahraje zvuk a další motor spustí klepeta, která sklapnou danou věc. Náš druhý program spustí třetí motor a ten vystřelí kuličku.
 |
 |
 |
| robot při výstavbě | poslední úpravy a zkouška programu | prezentace našeho robota |