
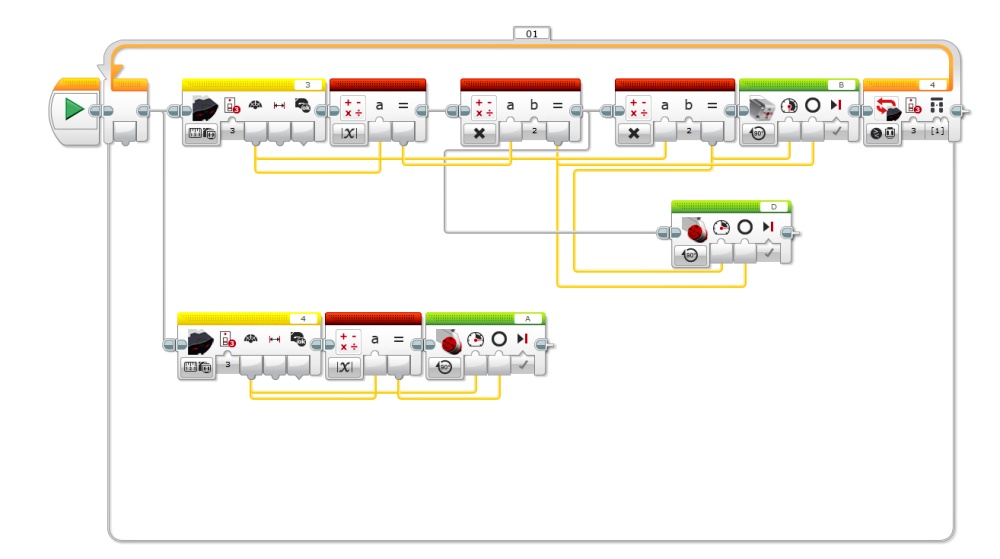
Robot se otáčí za signálem. Při specifickém signálu se vypne.
Sensory přijmou signál a určí svoji orientaci vůči signálu. Pak se vezme orientace v podobě čísla od -100 do 100 a prožene se skrze nekolik převodů zdůvodu lepší funkčnosti robota. Robot má dva signály kvůli 2 osám orientace jeen pro horizontální jedon pro vertikální. Každý sensor ovládá rychlost a rotaci motoru otáčejícího hlavou po dané ose.
 |
 |
 |
| stavba modelu | hotovo | programování |