 Skupina
B1
Skupina
B1
Skupina
B1
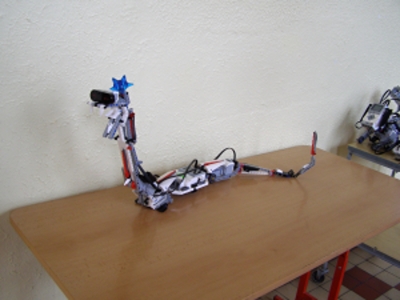
Jede dopředu. Když něco uvidí, nakloní se dopředu, otevře tlamu, zařve a vrátí se do původní polohy. Poté se opět rozjede.
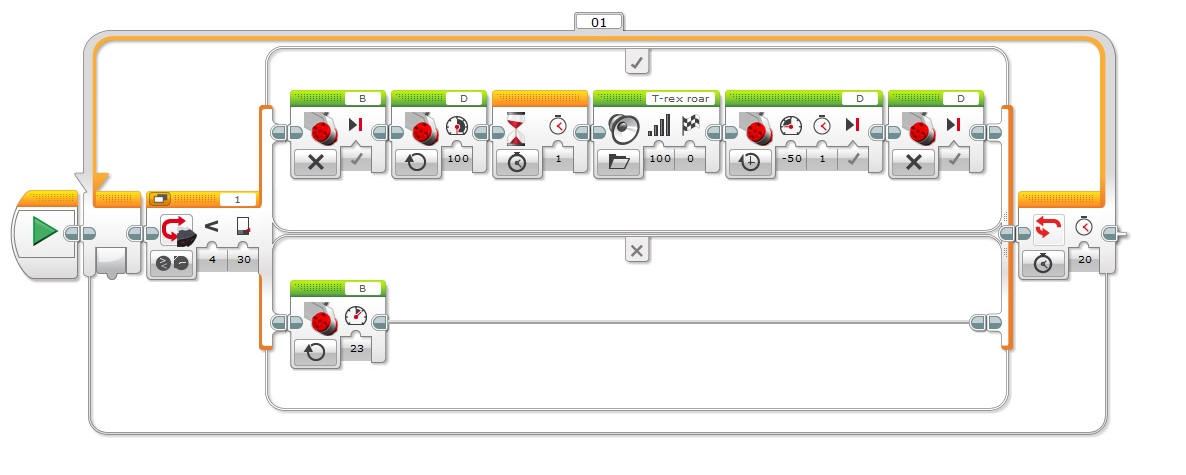
V podmínce je ultrasonický senzor. Když před senzorem nic není, je zapnutý motor, díky kterému jede had rovně. Pokud senzor něco uvidí, zastaví se, zapne se další motor, tím se nakloní dopředu. Poté zařve, motor se rozjede dozadu a potom se vypne. Program trvá 20 sekund.
 |
 |
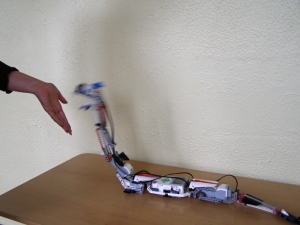 |
| Stavba robota | Představování anakondy | Had v akci |