 Skupina A5
Skupina A5
Skupina A5
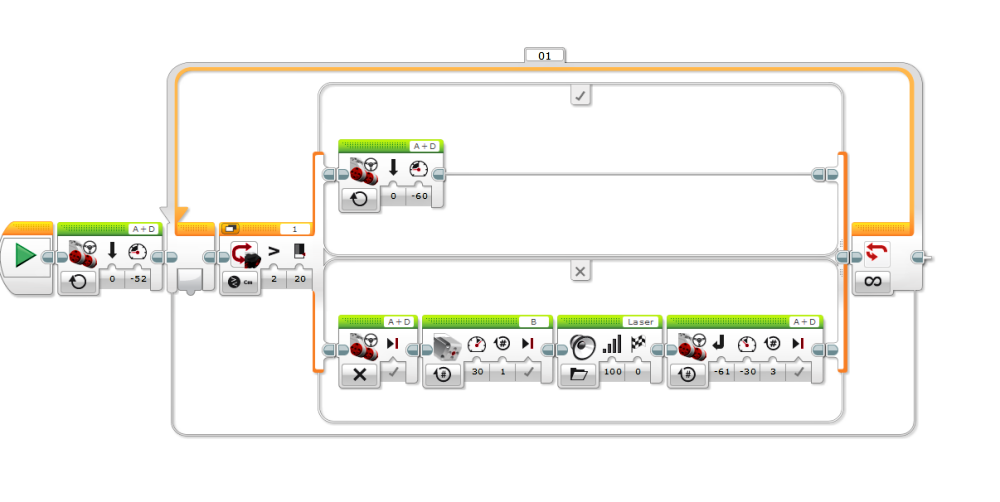
Po spuštění programu se tank rozjede, když před sebou uvidí nějakou překážku, zastaví se, vrták se roztočí a ozve se zvuk laseru, poté se tank otočí a jede dál..............
Program
Program je postaven na podmínce, která je založena na ultrazvukovém senzoru a je nastaveno, když vidí senzor něco do 20cm zapne laserový vrták vystřelí a ozve se zvuk laseru a poté se otočí a jede dál.Jestli nic nevidí tak jen jede.
 |
 |
 |
| průběh stavby robota | poslední úpravy robota | prezentace robota |