 skupina
Askupina
A
skupina
Askupina
A
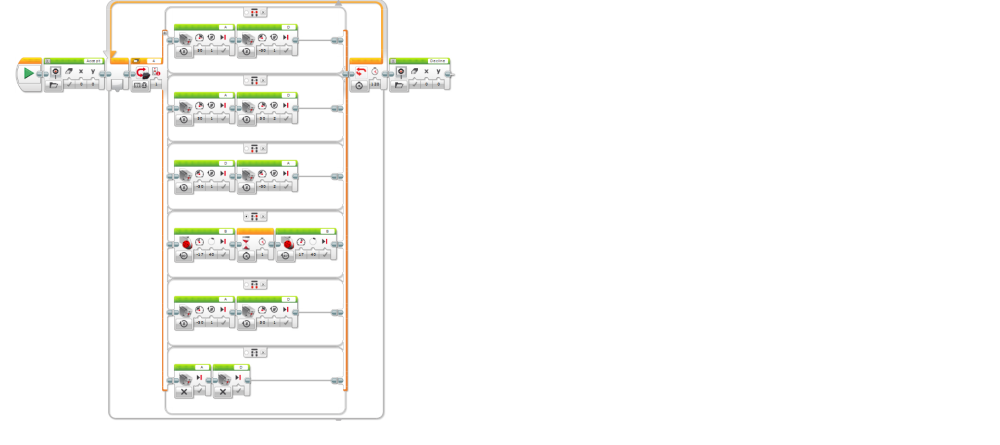
Náš brouk umí jezdit dopředu i dozadu pomocí otáčení každého kola zvlášť opakovaně za sebou. Také je schopný otevírat a zavírat svojí pusu a otáčet se do obou stran.
Program funguje na podstatě podmínky infračerveného senzoru ovládaného ovladačem, který je díky tomu schopný ovládat model pomocí zmáčknutí tlačítek, které jsou nastavené ke každé části programu. V 1. řádku se jede dopředu pomocí motorů v portu A a D, v 2. řádku zatáčí doleva, v 3. zatáčí doprava, ve 4. ovládá pusu otevřením a zavřením a v 5. jede dozadu.
 |
 |
 |
| Práce na zádech brouka | Stavba podvozku brouka | Původní návrh kol |