 Skupina
5Skupina
5
Skupina
5Skupina
5
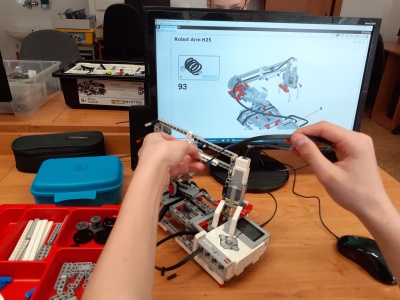
Naše mechanická ruka umí samostatně uchopovat, přenášet a přesně třídit drobné předměty podle naprogramovaných úkolů. Díky kombinaci motorů a senzorů dokáže reagovat na své okolí, např. jí díky tlačítkům můžeme přesně navést k předmětu, který má uchopit.
Po zapnutí programu se robot zeptá, na kterou stranu se má otočit. To mu řekneme pomocí tlačítek na "kostce". Ruka se otočí, sehne a uchopí předmět. Poté se otočí zpět a předmět položí. Toto může opakovat kolikrát chceme.

 |
 |
 |
| Stavba modelu | Finální podoba Ruky | Stavba modelu |